ผลิตภัณฑ์




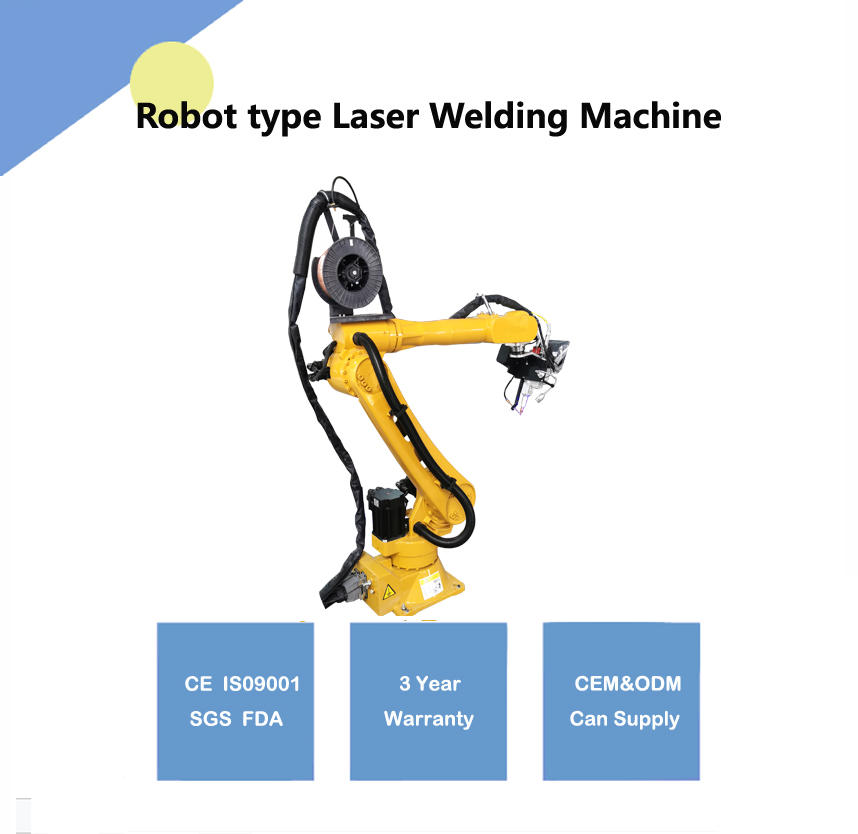
เครื่องเชื่อมเลเซอร์แบบหุ่นยนต์
การแสดงสินค้า
พารามิเตอร์ทางเทคนิค
| หุ่นยนต์ 6 แกน | ตูหลิง | ส่วนประกอบหลัก | แหล่งกำเนิดเลเซอร์ |
| การใช้งาน | เชื่อมโลหะ | กำลังขับสูงสุด | 2000วัตต์ |
| วัสดุที่สามารถนำไปใช้ได้ | โลหะ | ซีเอ็นซีหรือไม่ | ใช่ |
| โหมดทำความเย็น | ระบบระบายความร้อนด้วยน้ำ | ระบบไฟฟ้าและระบบลม | ชไนเดอร์ |
| ความยาวคลื่น | แรงบิดสูงสุด 1,090 นิวตันเมตร | พลังงานเลเซอร์ | 1000วัตต์/ 1500วัตต์/ 2000วัตต์ |
| น้ำหนัก (กก.) | 600 กก. | การรับรอง | ซี,ไอโซ9001 |
| ส่วนประกอบหลัก | แหล่งเลเซอร์ไฟเบอร์, ไฟเบอร์, หัวเชื่อมเลเซอร์แบบด้ามจับ | จุดขายหลัก | ความแม่นยำสูง |
| การทำงาน | การเชื่อมเลเซอร์ชิ้นส่วนโลหะ | ความยาวเส้นใย | ≥10ม. |
| อุตสาหกรรมที่เกี่ยวข้อง | โรงแรม, ร้านขายเสื้อผ้า, ร้านขายวัสดุก่อสร้าง | ส่วนประกอบหลัก | แหล่งกำเนิดเลเซอร์ |
| โหมดการทำงาน | ชีพจร | การบริการหลังการรับประกัน | การสนับสนุนออนไลน์ |
| เส้นผ่านศูนย์กลางจุดโฟกัส | 50ไมโครเมตร | ความคุ้มครองสูงสุด | 1730มม. |
| การตรวจสอบวิดีโอขาออก | ที่ให้ไว้ | รูปแบบกราฟิกที่รองรับ | เอไอ พีแอลที ดีเอ็กซ์เอฟ ดีดับเบิลยูจี ดีเอ็กซ์พี |
| แหล่งกำเนิดสินค้า | จี่หนาน มณฑลซานตง | ระยะเวลาการรับประกัน | 3 ปี |
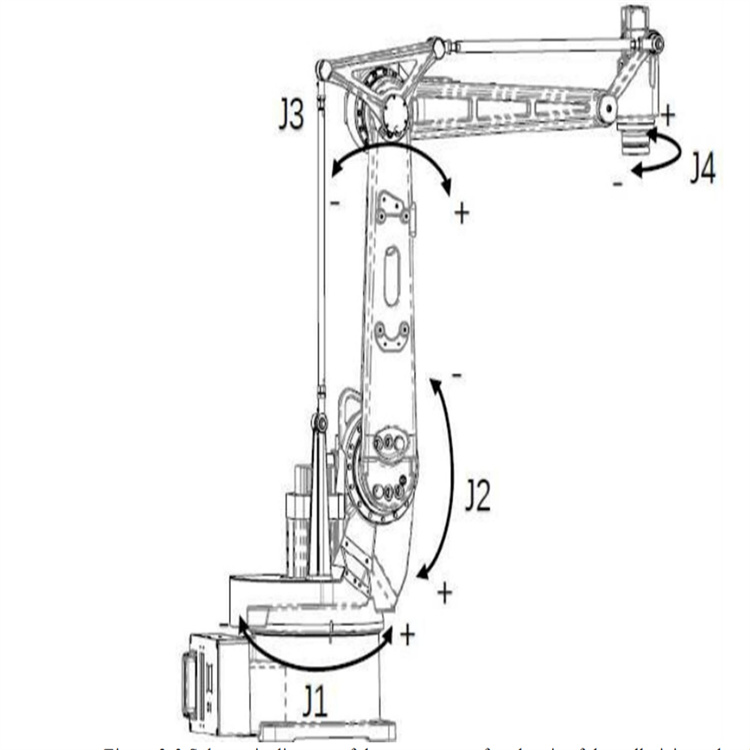
แขนหุ่นยนต์
แกนของหุ่นยนต์สามารถเป็นแกนหมุนหรือแกนเลื่อน และโหมดการทำงานของแกนจะถูกกำหนดโดยโครงสร้างเชิงกล แกนของหุ่นยนต์แบ่งออกเป็นแกนเคลื่อนที่ของตัวหุ่นยนต์และแกนภายนอก เพลาภายนอกแบ่งออกเป็นโต๊ะเลื่อนและตัวกำหนดตำแหน่ง เว้นแต่จะระบุไว้เป็นอย่างอื่น แกนของหุ่นยนต์จะหมายถึงแกนเคลื่อนที่ของตัวหุ่นยนต์
หุ่นยนต์ทัวริงแบ่งออกเป็นหุ่นยนต์อุตสาหกรรม 3 ประเภท:
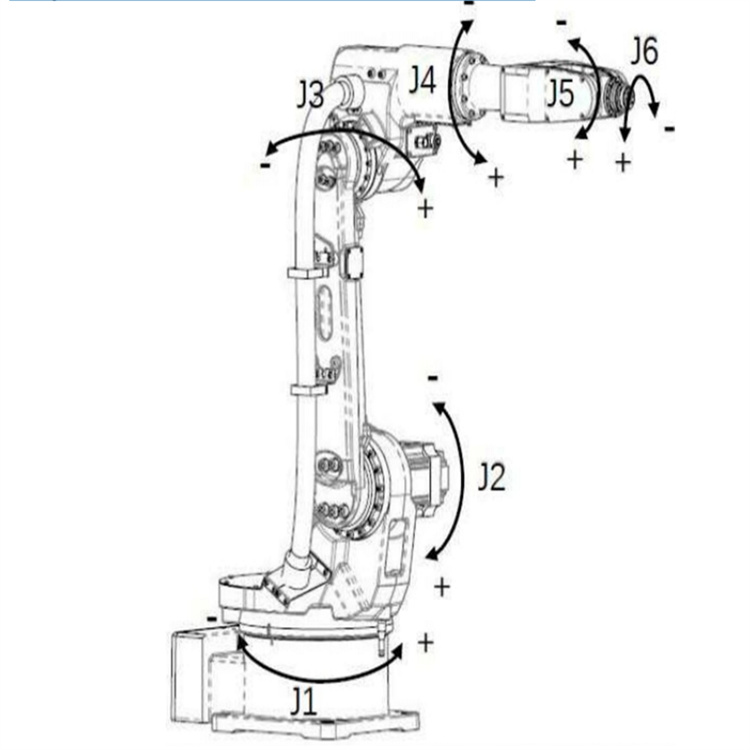
หุ่นยนต์อุตสาหกรรม 6 แกน: รวมแกนหมุน 6 แกน
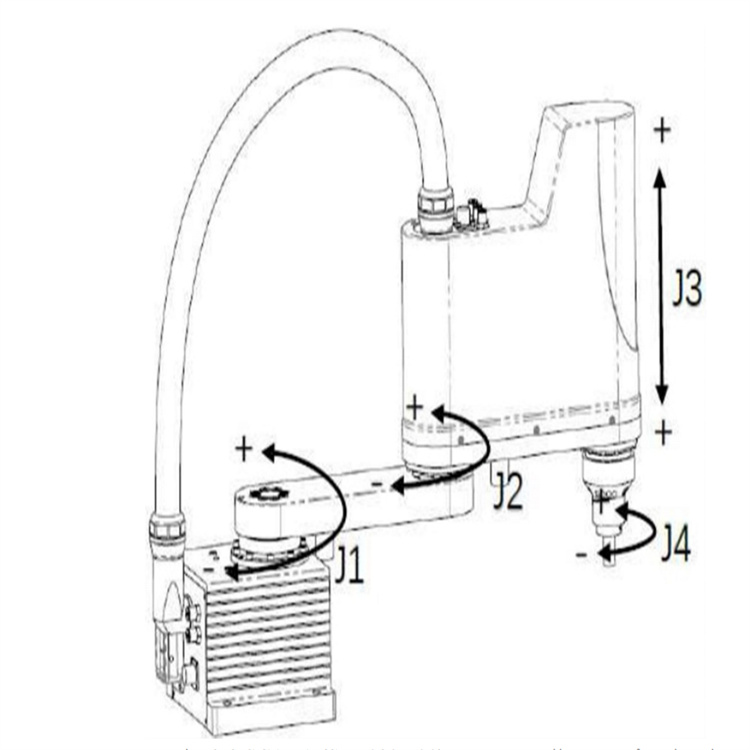
SCARA: มีแกนหมุน 3 แกนและแกนการเคลื่อนที่ 1 แกน
หุ่นยนต์จัดเรียงพาเลท: มีเพลาหมุน 4 แกน การเคลื่อนไหวร่วมกันของหุ่นยนต์แสดงไว้ในรูปภาพ
การประยุกต์ใช้เครื่องเชื่อมหุ่นยนต์
1.สาขาการผลิตเครื่องจักร
เนื่องจากงานเชื่อมมีความเข้มข้นมากขึ้นในอุตสาหกรรมการผลิตเครื่องจักร การทำงานเชื่อมจึงมีสภาพการทำงานที่แย่และมีการแผ่รังสีความร้อนสูง ซึ่งเป็นอาชีพที่อันตรายอย่างยิ่ง นอกจากนี้ ยังมีอุปกรณ์ขนาดใหญ่จำนวนมากในการผลิตเครื่องจักร ซึ่งเพิ่มความยากลำบากในการเชื่อมอีกด้วย หุ่นยนต์เชื่อมเป็นอุปกรณ์เครื่องกลอัตโนมัติที่ใช้ในงานเชื่อม ซึ่งช่วยปลดปล่อยความเข้มข้นของแรงงานของคนงานและช่วยปรับปรุงระดับของระบบอัตโนมัติในด้านการผลิตเครื่องจักร
2.รถยนต์และชิ้นส่วนรถยนต์ :
ในช่วงไม่กี่ปีที่ผ่านมา เพื่อตอบสนองความต้องการของสาธารณชน อุตสาหกรรมยานยนต์ได้แสดงให้เห็นถึงการพัฒนาที่หลากหลาย การเชื่อมแบบดั้งเดิมไม่สามารถตอบสนองความต้องการการเชื่อมที่สูงของการผลิตยานยนต์และชิ้นส่วนยานยนต์ได้ ตะเข็บเชื่อมมีความสวยงามและมั่นคง ในเวิร์กช็อปการผลิตยานยนต์สมัยใหม่หลายแห่ง ได้มีการสร้างสายการประกอบหุ่นยนต์เชื่อม
3.อุปกรณ์อิเล็กทรอนิกส์:
สาขาอุปกรณ์อิเล็กทรอนิกส์มีความต้องการคุณภาพการเชื่อมค่อนข้างสูง ด้วยความต้องการอุปกรณ์อิเล็กทรอนิกส์ที่เพิ่มมากขึ้นในสังคม อุปกรณ์อิเล็กทรอนิกส์ก็เผชิญกับความท้าทายที่รุนแรงในขณะที่พัฒนาอย่างรวดเร็ว หุ่นยนต์เชื่อมสามารถรักษาคุณภาพการเชื่อมให้คงที่ในขณะที่รับประกันประสิทธิภาพการผลิต การเชื่อมที่แม่นยำของอุปกรณ์นั้นสูงกว่าการใช้แรงงานคนถึงสามถึงสี่เท่า
4. การบินและอวกาศ:
โครงสร้างของเครื่องบินมีชิ้นส่วนเชื่อมเกือบ 1,000 ชิ้น และชิ้นส่วนที่เกี่ยวข้องเกือบ 10,000 ชิ้น ชิ้นส่วนรับน้ำหนักที่สำคัญส่วนใหญ่ของเครื่องบินใช้ชิ้นส่วนที่เชื่อม ตัวเครื่องเครื่องบินต้องรับแรงกดดันสูงระหว่างการบิน ดังนั้นข้อกำหนดในการเชื่อมจึงค่อนข้างเข้มงวด และหุ่นยนต์เชื่อมสามารถตั้งค่าพารามิเตอร์การเชื่อมได้อย่างยืดหยุ่นผ่านเทคโนโลยีการติดตามตะเข็บเชื่อมอัตโนมัติ เพื่อเชื่อมโครงสร้างเครื่องบินได้อย่างแม่นยำ
การบำรุงรักษาเครื่องจักร
- กลไกการป้อนลวด รวมถึงระยะการป้อนลวดปกติหรือไม่ ท่อป้อนลวดเสียหายหรือไม่ และมีสัญญาณเตือนผิดปกติหรือไม่ การไหลของก๊าซปกติหรือไม่ ระบบป้องกันความปลอดภัยของคบไฟเชื่อมปกติหรือไม่ (ห้ามปิดคบไฟเชื่อมเพื่อการป้องกันความปลอดภัย) ระบบหมุนเวียนน้ำทำงานปกติหรือไม่ ทดสอบ TCP (แนะนำให้รวบรวมโปรแกรมทดสอบและเรียกใช้หลังจากแต่ละกะ)
2. การตรวจสอบและบำรุงรักษารายสัปดาห์
1. ขัดแต่ละแกนของหุ่นยนต์ ตรวจสอบความแม่นยำของ TCP ตรวจสอบระดับน้ำมันที่เหลือ ตรวจสอบว่าตำแหน่งศูนย์ของแต่ละแกนของหุ่นยนต์ถูกต้องหรือไม่ ทำความสะอาดตัวกรองด้านหลังถังน้ำของเครื่องเชื่อม ทำความสะอาดตัวกรองที่ทางเข้าอากาศอัด ทำความสะอาดสิ่งสกปรกที่หัวฉีดของคบไฟเชื่อมเพื่อหลีกเลี่ยงการอุดตันการไหลเวียนของน้ำ ทำความสะอาดกลไกการป้อนลวด รวมทั้งล้อป้อนลวด ล้อกดลวด และท่อไกด์ลวด ตรวจสอบว่ามัดท่อและท่อไกด์ลวดชำรุดหรือแตกหรือไม่ (แนะนำให้ถอดมัดท่อทั้งหมดออกแล้วทำความสะอาดด้วยลมอัด) ตรวจสอบว่าระบบป้องกันความปลอดภัยของคบไฟเชื่อมเป็นปกติหรือไม่และปุ่มหยุดฉุกเฉินภายนอกเป็นปกติหรือไม่